Prevzaté z
RAILNET.SK: Špekulujem už dlho o „dobrom“ prestavníku na výhybky na moduly. Po rokoch som nič vhodné nenašiel. A tak prišiel "Sato" a urobil to :-)...
Požiadavky na „môj“ prestavník:
Pomalý chod (teda realistické prestavovanie, v trvaní cca 2 sek). Diskvalifikované sú všetky elektromagnetické prestavníky. Rovnako som „diskvalifikoval“ motorický prestavník Conrad (dostať u Conrada za cca 5EUR, kvôli slabému prevodu, prestavuje prakticky okamžite, a je dosť slabý)
Pomerne veľká sila prestavovania – je potrebná kvôli výhybkám Tillig. Tieto výhybky majú pružné jazyky a na spoľahlivé pritlačenie jazyka je potrebná výrazne väčšia ako pri jazykoch na čapoch. V tejto fáze som diskvalifikoval prestavník Hoffman. Tento síce prestavuje pomaly, ale len vďaka mechanickej brzde. Ak je brzda nastavená na pomalé prestavenie, sila na prestavenie je dosť malá.
Koncové vypínanie musí byť spoľahlivé a nesmie byť samosvorné. Samosvornosť sa prejavuje napr. u prestavníka Fulgurex, najmä u novšej sérii, kde na vypnutie kontaktu musí vyvinúť motor značnú silu a po vypnutí ostane závit a zuby v zábere tlakom vypínacieho kontaktu. Výsledkom je, že pri následnom pokuse o prestavenie sa stane, že sa motor občas nerozbehne. Pri použití vyššieho napätia, prestavník prestavuje rýchlejšie, ale má tendenciu koncovú polohu „prebehnúť“ a tým sa zovrieť ešte viac. Teda začarovaný kruh.
Prepínanie jazykov a srdcovky. DCC je ďaleko háklivejšie na spoľahlivý kontakt ako analog. Napájanie (a prepínanie) srdcovky a prípadne aj jazykov je absolútna nevyhnutnosť. Inak prídeme o zážitok z pomalej jazdy. Prepínanie musí byť závislé od mechanickej polohy jazykov. Tým sú pre mňa diskvalifikované všetky „elektronické“ spôsoby (relé a pod.). To je preto, že pri zapnutí/vypnutí systému nesmie nevhodným poradím zapnutia DCC a ovládania nastať skrat. Prepínacie kontakty by mali byť spoľahlivé, musia byť dostatočne dimenzované.
Podľa možnosti musí byť prestavovací mechanizmus byť nezávislý od pohonu – teda aby sa dal použiť ručný aj motorický pohon, prípadne modelárske servo.
Pohon modelárskym servom má niekoľko svojrázností. Nepotrebuje koncové vypínanie (koncové polohy sa dajú nastaviť), ale v koncovej polohe by nemalo byť servo namáhané silou, lebo tom by ostalo v „zábere“. Veľmi podobné tomuto je , ručné prestavenie, kde v koncovej polohe by malo dôjsť k aretácii, alebo mechanizmus by mal byť samosvorný.
Prevod z pohonu na výhybku je asi jednoznačne najlepší spôsob „Fulgurex“, torznou tyčou. Je to najbezpečnejší spôsob z hľadiska padanie nečistôt do priestoru prechodu pohonu z povrchu do spodnej strany., ale aj nastavenia a prípadnej opravy, alebo výmeny (netreba sa prebúrať pod výhybku) .
Celý mechanizmus prestavníka musí byť ľahko postaviteľný, bez špeciálneho náradia, bez prílišných nárokov na presnosť, ale pritom jednoducho nastaviteľný.
Tak som začal zostavovať mechanizmus „od konca“.

Škica prepínacích kontaktov prestavníka
Ako kontakt som použil mikrospínače. Sú spoľahlivé, majú dostatočné prúdové zaťaženie (10A). Vo vhodnom usporiadaní (páka s valčekom a posuvnou kulisou) je sila potrebná na prepnutie veľmi malá a pred a po prepnutí je nulová. Aj cena je dobrá (cca 0,50€)

Nákres v Autocade.
Posuvná kulisa môže mať aj dlhší chod, ako sú koncové polohy spínačov, teda pri prebehu pohonu nie je prevod namáhaný silou, a je možné urobiť aj „tvrdé“ mechanické dorazy. (V koncovej polohe mikrospínča je silnejší prítlak neprípustný)
Ako stavebný materiál som použil dosky HPS (tvrdený polystyrén) hrúbky 2mm. Ten režem na modelárskej cirkulárke na obdĺžniky (základňa) a pásy (ostatná bižutéria). Na lepene používam čistý toluén alebo percholetylén, na spôsob „studeného zvaru“. (Natriem jemne obe plochy štetcom, nechám pár sekúnd naleptať a pritlačím). Funguje to ako sekundové lepidlo.

Prepínacia časť prestavníka.
Stavba:
Vyrezať súčiastky (základne, a pásy š.6mm) Na základni označiť a vyvrtať diery pre mikrospínače, zo spodu zahĺbiť pre skrutky M2,6, priskrutkovať mikrospínače.
Do stredu položiť pás budúceho tiahla, a z „nakrájaných zvyškov“ vybudovať vodiace šachty. Vrchný, krycí kus śachty je dobré podložiť fóliou HPS hr.0,25mm, alebo treba obrúsiť tiahlo, aby sa pohybovalo ľahko.
Na tiahlo treba prilepiť „kameň“ do stredovej polohy. Pri troche šťastia „to“ začne fungovať na prvý krát.
Asi najlepšie je princíp pochopiteľný z obrázkov. Pre prípadných „nasledovníkov“ je priložený aj scan s náčrtkom a s rozmermi.
Pohon:
Prvú verziu som robil na ručné ovládanie. Ovládacie tiahlo je z drôteného vešiaka (dostanete v každej lepšej čistiarni, kde vám na tom vrátia vyčistené nohavice). Drôt má hr.cca 2,4mm, má lesklý povrch a myslím, že nehrdzavie. Z neho som vyrobil dve ovládacie kľuky a stredný diel – vlastne tiež kľuku. Pospájané to je lustrovými svorkami (najmenšie, majú otvor cca 2,5mm.



Konštrukcia prestavníka. Vľavo spôsob prestavovania kľukou, v strede pohon výhybky torznou tyčou, vpravo prepínač. Postupne zhora sú jednotlivé polohy.
Spínaciu časť lepím na spodok modulu pomocou balzovej „redukcie“. Základňu HPS (spodok) natriem bohatšie riedidlom, nechám dobre rozleptať a pritlačím balzu. Následne sa balza už lepí spoľahlivo disperziou kamkoľvek (drevo, styrodur)
Torzné tiahlo robím z MS drôtu 1mm, trubička je 2/1mm (dodá Artol). Tiahlo prihnem tak aby sa jemne dotýkalo prestavovacieho tiahla a nalepím dva dorazy. Kedykoľvek treba výhybku odskúšať, opraviť, je možné drôt nadvihnúť a pohybovať s ním nezávisle od pohonu (napr. ak je to motorický) .

Pohon torznou tyčou.
Na záver zostavím kulisu pre ručný pohon. Spínač presuniem do jednej krajnej polohy, kľuku otočím do tej strany a prilepím jednu časť kulisy, to isté spravím v druhej krajnej polohe. Tým mám vymedzené presne posuv spínača z jednej do druhej krajnej polohy.
Hotovo.
Elektrické zapojenie:
V prípade izolovanej srdcovky je zapojenie triviálne, srdcovka sa pripojí k správnej polarite podľa polohy.
Ak však je izolovaná iba jeden časť srdcovky, a jazyky sú z jedného kusu (prípad výhybiek TT, a H0e) je potrebné to zapojiť tak, aby odvrátený jazyk nebol pod napätím, a nespôsoboval náhodné skraty s vnútornou stranou dvojkolia
Trik je v správnom pospájaní mikrospínačov. (Toto je dôvod, prečo nestačí jeden prepínač –ten má len dve polohy, môj spínač má polohy 3)

Zapojenie prepínačov. Pri prestavovaní sa najprv prepne spínač vpravo (tým odpojí jazyky aj srdcovku od napájania. Po dobehnutí do druhej krajnej polohy sa prepne spínač vľavo a tým sa pripojí správne napájanie.
Variácie na túto tému:
Pre pohon obyčajným elektromotorom s prevodom je potrebné koncové vypínanie. Lenže musí byť zaručené, že najprv sa prepne prepínač, cez ktorý sú napájané jazyky, až potom sa pohon zastaví. Vhodným rozmiestnením spínačov a tvaru kameňa, je to možné dosiahnuť.

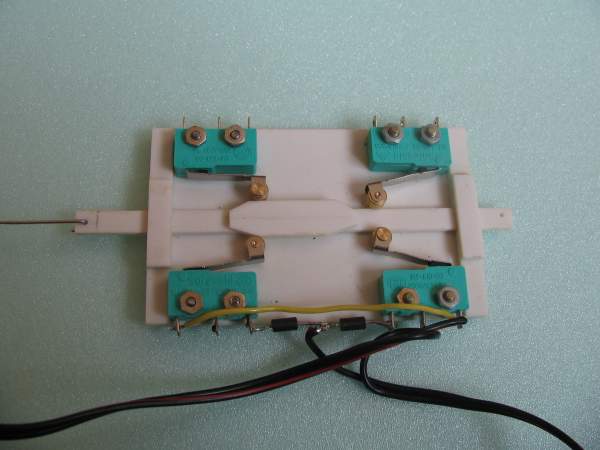
Prepínacia časť pre pohon elektromotorom. Dolné spínače sú koncové, horné prepínajú jazyky a srdcovku. Z tvaru kameňa je vidieť, že vždy sa najprv zopne horný spínač (jazyk) až potom dolný (koncová poloha)


Elektromotor s prevodovkou zostavenou zo setu od Conrad-a. Pri plnom napätí je doba na prestavenie cca 3-5sekúnd. Stačil by možno menší prevod (4stupňe) a nižšie napätie. Motor skoro bez záťaže, môže byť veľmi slabý.
Elektormotorický pohon je možné riešiť aj množstvom iných spôsobov. Keďže ide o lineárny posun, je to možné riešiť napr. závitovou tyčou, buď priamo na oske motora, alebo cez prevod. Teoreticky je možné posun robiť aj modelárskym servovm, ale v prípade serva by som použil zložitejšie riešenie:
Na vývod serva nasadiť páku s kľukou (podobnou ako ručný pohon). Výsledkom tohto riešenia je niekoľko výhod: Využíva sa celý rozsah pohybu serva, dlhšia dráha, teda pomalší chod. Nie je treba presne nastaviť koncové polohy, stačí ich nastaviť "vonku" na cca 180stupňov, symetricky okolo stredu. A hlavne: v koncovej polohe servo NIE je namáhané žiadnou silou. Pri dobehu do koncovej polohy sa mení rameno páky, teda na dotlačenie jazykov je možné použiť výrazne väčšiu silu.
Riadenie serva mám vyriešené pomocou PIC. Ten môže "počúvať" na impulzy z tlačidiel, alebo na povely zo sériovej linky z PC, prípadne by sa dali urobiť iné spôsoby ovládania. Jeden 8 nohový PIC môže ovládať 2 servá.
Ak vás tento pohon zaujal a chcete si ho postaviť, motivujte ma, aby som nakreslil poriadne výkresy 
J.